We are full stack application and network infrastructure developers. We develop and maintain software, servers, custom working environments and supporting networks.
Supporting and developing for Web, Microsoft, Android, iPhone & Linux platforms, we offer a variety of powerful solutions including our line of web based software suites.
We support most small to large commercial networks and servers and can provide installations, diagnostics, maintenance and upgrades for new and existing networks and servers.
Offering
- Website & web application design & hosting
- Custom business servers
- Network wide data security & integrity
- Working environments for centralized and non centralized workplaces

CAMM Services
CAMM Services is the original and primary entity providing services as listed on this site.
Founded late 2007 and located in north-western Norfolk County, CAMM Services started by providing services to Haldimand, Norfolk & Brant County.
We are now pleased to provide on-site services across southern Ontario and software & web services world wide.

CammSoft
As of late 2023, we have organised software & web development into it's own brand.
This allows us to better organise development services, assets and personnel.
In addition to directly supporting our clients, we are also working to release more low cost and free web based development services for others to use.

Search Norfolk Ca
The SearchNorfolk initiative is our way help promote local businesses.
We are working to bring the site live by Canada Day 2024.
We'll be posting the site address and progress board shortly.
| General Contact Hours: | Monday - Friday | 9:00am - 5:00pm |
| Phone Number: | Loading... |
| E-mail Address: | Loading... |
| Mailing Address: | Loading... |
| Loading... | |
| Loading... |


On-Site
CAMM Services installs and maintains on-site networks, servers & workstations. Using modern solutions, we design each infrastructure solution around how you work. With high focus on data intregrity and uptime continuity, we ensure your data is protected and your company continues to operate.
Hosted
Does your business operate out of office? Do you not have a reliable location to host your own infrastructure? Do you wish to avoid the cost of maintaining your own infrastructure?
Let us do the hosting for you. We have the facilities to host and maintain your services for you at a cost less than maintaining your own infrastructure. As we backup incrementally and off-site, enjoy the peace of mind of knowing we are handling everything for you.
Development
Need a website, custom CRM, asset management suite, mobile app or some other application developed? CAMM Services with CammSoft can get your project up and running.
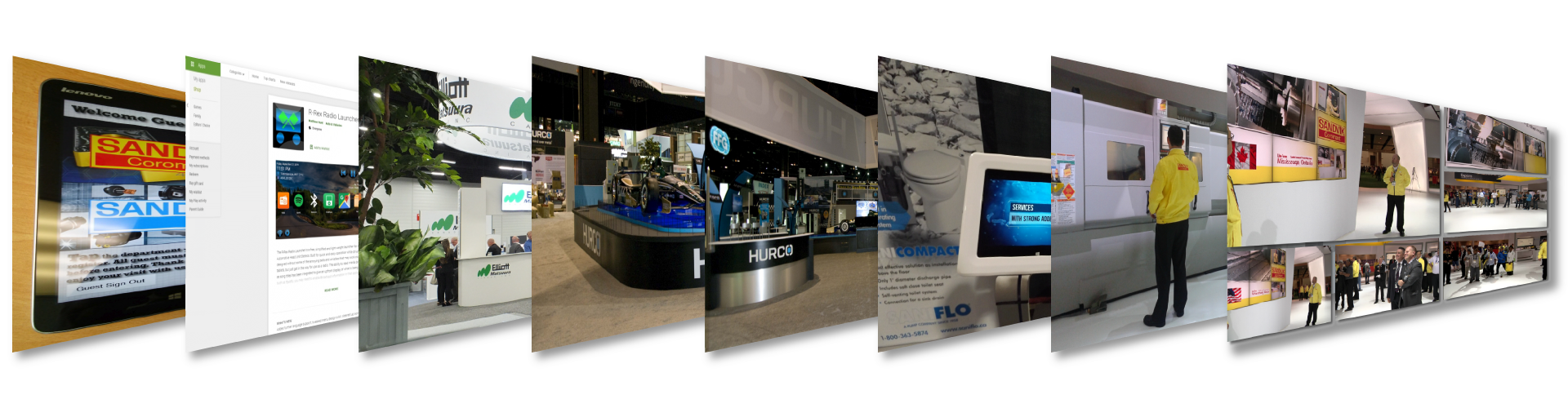
Proud to have served:













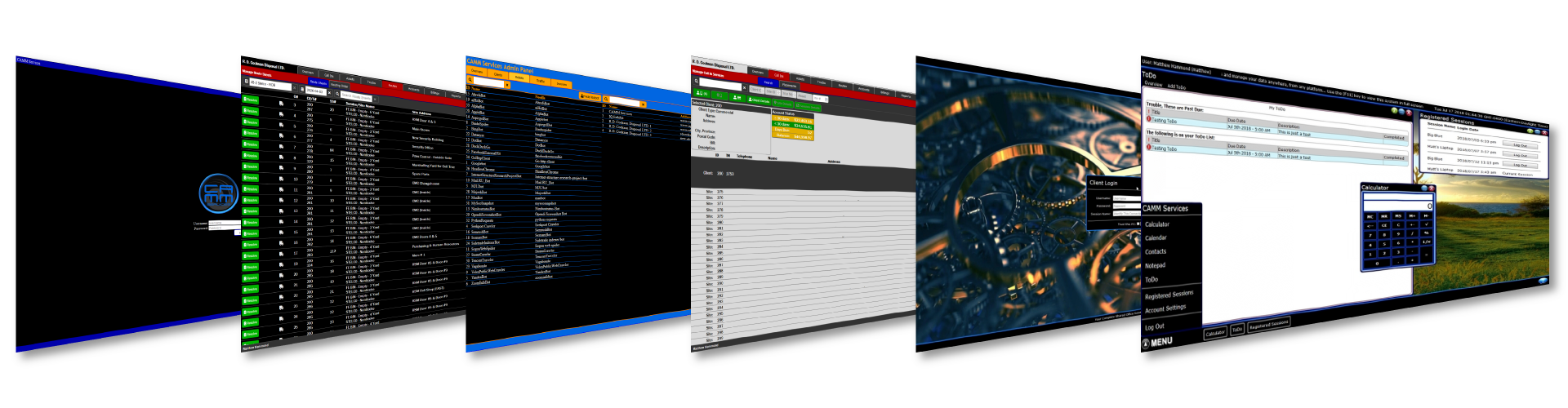
Websites

Applications
Looking for an online presence? Whether you're looking for a basic information site or are looking to sell products online, CAMM Services can help you every step of the way.

Web Browser Development
- Websites
- E-commerce
- C.R.M.
- A.P.I.
- Virtual Office

Windows Development
- Apps
- Support Utilities

Android Development
- Apps
- Support Utilities

iOS Development
- Apps
- Support Utilities
Time to take your business to the next level.
CAMM Services offers hosted services, on-site installations and combinations of the two.

TrueNAS
A fantastic data integrity solution.
- Licensing from Community to Enterprise
- Redundancy against multiple failures
- Synchronization between multiple servers
- Incremental Snapshots and Versioning
- Virtual Machine Hosting
When your data matters, back it up, then back it up & back it up again...
- Installation Available
- Off-Site Backup Available

Ubuntu Server
Our prefered operating system for most servers.
- Licensing from Community to Enterprise
- Supports Most Solutions
- Great For Both Virtual Machine Hosting and as Guest
A robust linux environment suitable for many tasks.
- Installation Available
- Off-Site Backup Available
- Virtual Machine Guest Available

Nextcloud
Business without chains.
- Working Out Of Office
- Working With No Office
- Optionally Available Offline
- Centralized Data Integrity
Nextcloud is a great solution for high available data across a non centralized workforce.
- Installation Available
- Hosting Available
- Virtual Machine Guest Available

MySQL
SQL Database Solution
- Standalone (Snapshot Backup)
- Redundant Availability
- High Availability
Let us know your needs, we'll make it work.
- Installation Available
- Hosting Available
- Virtual Machine Guest Available

MongoDB
NoSQL Database Solution
- Standalone (Snapshot Backup)
- Redundant Availability
- High Availability
Let us know your needs, we'll make it work.
- Installation Available
- Hosting Available
- Virtual Machine Guest Available

pfSense
Reliable networking foundation
- Single/Multiple Internet Connections
- Fast, Reliable Traffic Shaping
- Modern & Highly Configurable Firewall
- Multiple Subnets
- Point-to-Point VPN (IPSec, OpenVPN, L2TP)
Make the most of your network by starting from a solid foundation.
- Installation Available
- Virtual Machine Guest Available

Pi-hole
Funny name, network wide ad and tracker filtering.
- No Licensing Fee
- Low Resource Demand
- Originally targeted to function on the Raspberry Pi Micro Computer
Cleanup your web traffic by blocking unwanted ad and tracking domains.
- Installation Available
- Virtual Machine Guest Available
